Structure from Motion
Structure from Motion (SFM) from scratch, using Numpy and OpenCV.
In this repository, we provide
- Self-reliant tutorial on SFM
- SFM Python Script
- Associated Booklet
1. Getting Started
These instructions will get you a copy of the project up and running on your local machine for development and testing purposes.
1.1. Prerequisites
To run tutorials, you need to have following libraries installed:
Numpy >= 1.13.1
OpenCV 3
Meshlab
Furthermore, to run SFM python script, you also need:
OpenCV Contrib
1.2. Data
Please download the standard data benchmarks from here
After downloading, you should have the following directory structure
data/
fountain-P11/
images/
0001.jpg
...
0011.jpg
gt_dense_cameras/
0000.jpg.camera
...
0011.jpg.camera
Herz-Jesus-P8/
...
Castle-P19/
...
...
2. Demo/Quick Start
2.1. Tutorial Notebook
Tutorials are in tutorial/ directory. Furthermore, they’re divided in following sections
- Chapter 1: Prerequisites
- Chapter 2: Epipolar Geometry
- Chapter 3: 3D Scene Estimations
- Chapter 4: Putting It Together: Part I
2.2. SFM Script
- Go to
script/directorycd script - Run
featmatch.pyto generate feature keypoints, descriptors and matchespython featmatch.pyAll arguments are shown below:
usage: featmatch.py [-h] [--data_dir DATA_DIR] [--ext EXT] [--out_dir OUT_DIR] [--features FEATURES] [--print_every PRINT_EVERY] [--save_results SAVE_RESULTS] optional arguments: -h, --help show this help message and exit --data_dir directory containing images (default: ../data/fountain-P11/images/) --ext comma seperated string of allowed image extensions (default: jpg,png) --out_dir root directory to store results in (default: ../data/fountain-P11) --features [SIFT|SURF] Feature algorithm to use (default: SURF) --matcher [BFMatcher|FlannBasedMatcher] Matching algorithm to use (default: BFMatcher) --cross_check [True|False] Whether to cross check feature matching or not (default: True) --print_every [1,+inf] print progress every print_every seconds, -1 to disable (default: 1) --save_results [True|False] whether to save images with keypoints drawn on them (default: False) - Run
sfm.pyto generate point cloud:python sfm.py --data-dir <path-to-data-directory>All arguments are shown below
usage: sfm.py [-h] [--data_dir DATA_DIR] [--dataset DATASET] [--ext EXT] [--out_dir OUT_DIR] [--features FEATURES] [--matcher MATCHER] [--cross_check CROSS_CHECK] [--calibration_mat CALIBRATION_MAT] [--fund_method FUND_METHOD] [--outlier_thres OUTLIER_THRES] [--fund_prob FUND_PROB] [--pnp_method PNP_METHOD] [--pnp_prob PNP_PROB] [--allow_duplicates ALLOW_DUPLICATES] [--color_policy COLOR_POLICY] [--plot_error PLOT_ERROR] [--verbose VERBOSE] optional arguments: -h, --help show this help message and exit --data_dir root directory containing input data (default: ../data/) --dataset name of dataset (default: fountain-P11) --ext comma seperated string of allowed image extensions (default: jpg,png) --out_dir root directory to store results in (default: ../results/) --features [SIFT|SURF] Feature algorithm to use (default: SURF) --matcher [BFMatcher|FlannBasedMatcher] Matching algorithm to use (default: BFMatcher) --calibration_mat [benchmark|lg_g3] Type of intrinsic camera to use (default: benchmark) --fund_method [FM_RANSAC | FM_8POINT] Method to estimate fundamental matrix (default: FM_RANSAC) --outlier_thres Threshold value of outlier to be used in fundamental matrix estimation (default: 0.9) --fund_prob [0, 1] Confidence in fundamental matrix estimation required(default: 0.9) --pnp_method [SOLVEPNP_DLS | SOLVEPNP_EPNP | ...] Method used for PnP estimation (default: SOLVEPNP_DLS) --pnp_prob [0, 1] Confidence in PnP estimation required (default: 0.99)
3. Results
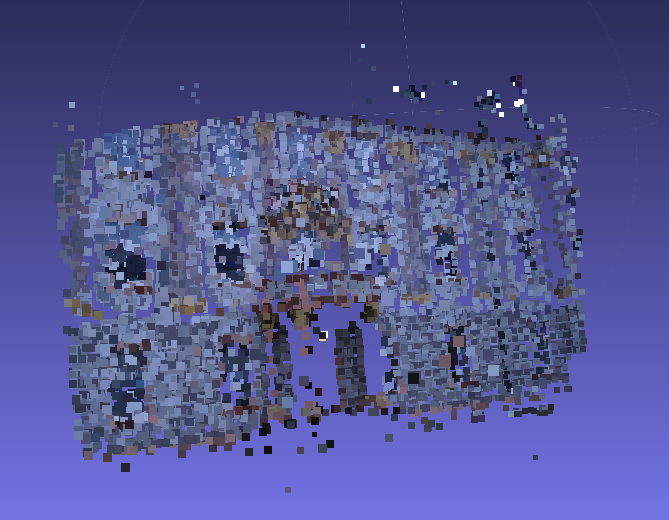
3.1. Fountain P11
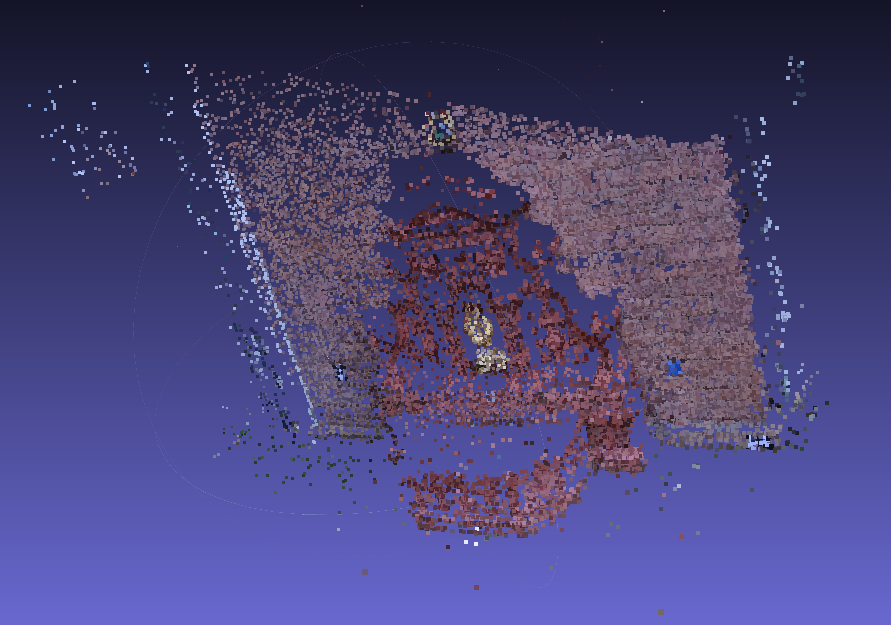
3.2. Herz Jesus P8
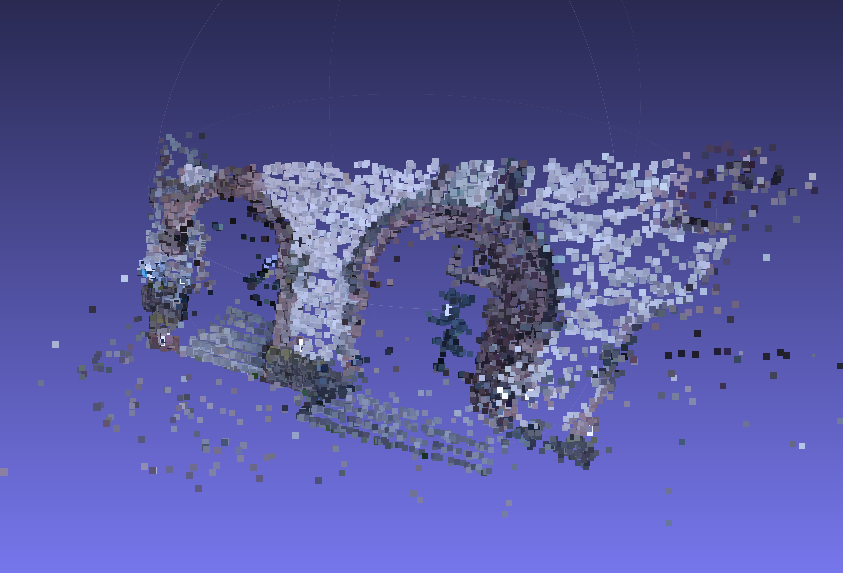
3.3. Entry P10